ブラシレスDCモータの速度はどう制御する?速度制御方式を解説
-
自動化
-
医療・福祉
-
環境
-
車載
2021年12月21日
すぐ買える、届いてすぐ使えるモータを探す(「プレクスモーション」モータ製品サイト)
ブラシレスDCモータの回転速度の制御は、課題に応じたさまざまな方式があります。それらの課題は、ブラシレスDCモータの用途によって異なります。この記事では、ブラシレスDCモータの回転速度を制御する代表的な方式を、その長所や主な用途などとともに紹介します。
ブラシレスDCモータの速度制御の基本的な考え方
ブラシレスDCモータでは、回転速度は印加電圧、負荷トルクの関係で決まります。つまり、モータを使用する時に電圧を変えることで回転速度を制御することができます。
また、ブラシレスDCモータはモータを回転させるために必ず駆動回路があり、この駆動回路で電圧や電流を調節することで速度制御を行います。
DCモータの速度制御はフィードバック方式による電圧制御が一般的
ブラシレスDCモータを含むDCモータの速度制御は、電圧制御が一般的です。
また、モータ、駆動回路、制御器、速度検出器という構成により、速度検出器の信号を制御器にフィードバックして目標とする回転速度となるように制御を行います。
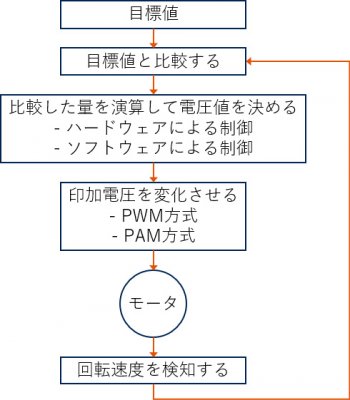 電圧制御によるDCモータ速度制御方法の模式図
電圧制御によるDCモータ速度制御方法の模式図
DCモータの駆動電圧を変化させる方法の違いによる、2種類の電圧制御方式
DCモータの駆動電圧を変化させる方法として、PWM、PAMの2種類の方式があります。
PWM方式
PWMとはパルス幅変調(Pulse Width Modulation)の略です。パルス状に電圧を印加する方式の一つで、パルス幅(オンデューティー量)を変調させることで、モータを駆動する電圧(平均電圧)を変化させます。
PWM方式は回路構成が比較的単純で、DCモータでは一般的に使われています。
PAM方式
PAMとはパルス振幅変調(Pulse Amplitude Modulation)の略です。この方式ではパルスの電圧レベルを変えることで、モータに印加される電圧を変化させます。
PAM方式はPWM方式より回路構成が複雑です。高電圧で駆動させる大型のDCモータや、10万回転/分を超えるようなDCモータなどで、高効率化のために用いられることが多いです。
DCモータで速度制御を行う際の課題
DCモータを使った装置・製品を設計する際、「装置・製品が動作する間、実際の速度が目標とする速度にどれだけ近づいた状態を保てるか」が速度制御における大きな課題です。
具体的には、例えば次のような課題があります。
負荷トルクの変化
負荷の状態や外部・内部条件(温度、湿度、モータの経時変化)が変わると負荷トルクが変化します。この変化がモータの実際の速度に影響を及ぼします
残留偏差
速度制御時に速度が安定した状態でも発生する、目標速度と実際の速度との差を残留偏差と呼びます。
速度に対する要求精度が高い場合に問題となります。
応答性
モータの慣性モーメント(イナーシャ)は、駆動トルクに対して回転速度が遅れて応答する位相差を生じさせます。回転速度を上げたい時に入力電圧を上げても、この遅れのために回転速度が遅れて変化します。
実際の速度をより速く目標の速度に近づける制御が必要となる場合に問題となります。
速度制御の課題を解決する、DCモータの高精度な制御方式
電圧制御をより精緻に行うための方法を、長所や留意点、用途とともに紹介します。課題に応じてどの方式を採用するか検討しましょう。
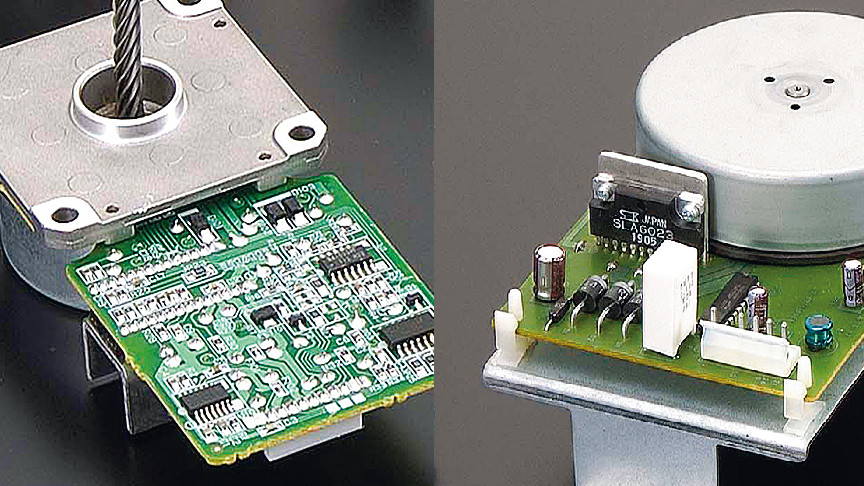
ハードウェアによる速度制御
ハードウェアによる制御では、ICを使用して制御回路を構成し、速度フィードバックと位相フィードバックの2種類のフィードバックを使用します。
速度フィードバックでは、FGサーボ、または速度ディスクリミネータを使用します。いずれも、センサにより検知した速度と目標速度との差を使用してフィードバック制御を行います。
位相フィードバックでは、PLLを使用します。PLLはPhase Locked Loopの略です。センサが検知した位置のパルス信号と目標位置のパルス信号との位相差を使用してフィードバック制御を行う方式です。
速度フィードバック/位相フィードバックの2種類を使う理由は、速度フィードバックのみでは、残留偏差が大きいためです。位相フィードバックを組み入れることで残留偏差を小さくしています。
速度フィードバック/位相フィードバックの信号は、ループフィルタでアナログ電圧に変換され、PWM/PAM方式でモータに電圧を印加させます。ループフィルタは制御特性を決める役目もしており、フィルタ回路を構成する抵抗やコンデンサなどのハードウェア部品を使用して特性が調整されます。そのため制御特性は固定値となりますので、モータを使用する製品に合わせてあらかじめ調整することになります。
制御量がハードウェア部品で調整されているため、制御量が固定される用途に限られますが、市場の多くの製品は制御量の調整を個別には行わないことから、比較的安価に構成できるこの方式が採用されています。
- 用途
- 複写機など、一定の速度で動作させる装置
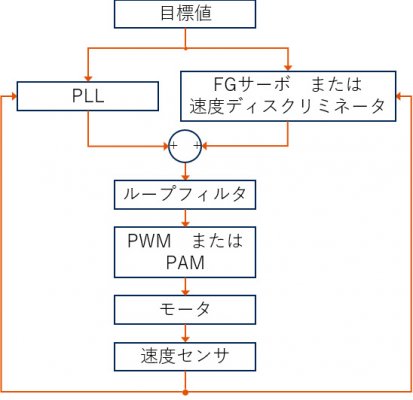 FGサーボ 又は 速度ディスクリミネータ + PLL制御 のブロック図
FGサーボ 又は 速度ディスクリミネータ + PLL制御 のブロック図
ソフトウェアによる制御
ソフトウェアによる制御では、マイコンを使用して制御器を構成し、PID制御が使用されています。PIDはProportion(比例)、Integral(積分)、Differential(微分)の頭文字を取ったものです。実際の速度と目標とする速度との差およびそれを積分・微分したもの、計3要素をフィードバックします。積分は位置差(位相差)に対応し、残留偏差を小さくする役割を果たします。微分は加速度差に対応し、応答性改善の役割を果たします。マイコンを使用しているため制御特性の調整が可変です。そのためモータが使われている製品ごとに制御特性の調整を行うことができます。
マイコンを使用するためモータは高価になりやすいですが、近年では安価なマイコンが普及し、この方式を採用するモータは増えています。
- 用途
- より多くのパラメータ調整が必要な用途。ロボットなど。
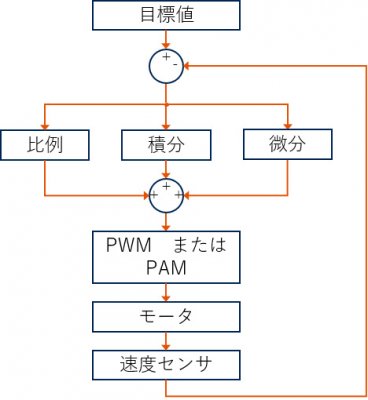 PID制御のブロック図
PID制御のブロック図
ブラシレスDCモータ選びは、課題や用途に応じた速度制御方式に注意しよう
ブラシレスDCモータにはさまざまな速度制御方式があります。モータを使用する機器で求められる回転速度の速さや変化、精度、負荷、使用環境、モータのコストなどを考慮した上で、どの制御方式を採用したモータが良いかを選びましょう。
すぐ買える、届いてすぐ使えるモータを探す(「プレクスモーション」モータ製品サイト)
同シリーズのコラム
- NEMA17ステッピングモータ選定ガイド 取り付け寸法の規格から、用途・選び方・課題解決まで
- ステッピングモータのNEMAサイズ一覧と選び方ガイド
- ステッピングモータは何をするもの?
- DCモータの特長とその用途について解説
- ブラシ付きDCモータに比べブラシレスDCモータが優れている部分
- ブラシレスDCモータの価格と性能、部材について
- DCモータのタイプと特徴を解説
- ブラシレスDCギヤードモータとは
- 小型ブラシレスDCモータの出力やサイズ・減速比の特徴と選び方のポイント
- ブラシ付きDCモータとブラシレスDCモータの違いを解説
- ブラシレスDCモータのデメリットとは?解決法をあわせて解説
- ブラシレスDCモータの利点とは?ブラシ付DCモータとの違いも解説
- 電動機とは
- ブラシレスDCモータとは
- ブラシレスDCモータの仕組みとは?駆動回路が必要な理由を解説
- どのように制御する?DCモータの速度制御
- ブラシレスDCモータには駆動回路必要?ブラシレスDCモータの制御方法
- ブラシ付きDCモータの仕組みとは?定期的なメンテナンスが必要な理由を解説
- どのように制御する?ステッピングモータの速度制御の方法
- ブラシレスDCモータの用途 その特徴を活かした例を紹介
- ステッピングモータの用途 その特徴を活かした例を紹介
- ステッピングモータの仕組みとは?制御が容易なモータ
- ブラシ付きDCモータとブラシレスDCモータにはどのような違いがある?それぞれを確認
- コンデンサモータとは
- サーボモータとは
- ブロワとは
- アクチュエータとは
- ステッピングモータとは
- DCモータとは?その特徴や仕組みを紹介