サーボモータとは
-
自動化
-
医療・福祉
-
環境
-
車載
2020年7月13日
一般的なモータが主に機器の動力源として連続回転に使われるのに対し、制御機構を備えるサーボモータは、一定の角度だけ回転して正確な位置で止まることができます。この特長を生かして、産業用ロボットの関節の位置決めからラジコン飛行機の舵の角度決めまで、産業やホビー分野などさまざまなシーンで機器の制御に使われています。
サーボモータの定義
サーボモータのサーボ(servo)は、いわゆる制御機構のことを指します。テクノロジーの領域では、制御する側をマスター(master)、制御される側のことをスレーブ(slave)と呼ぶことがありますが、サーボもスレーブも、ラテン語のServus(奴隷)に由来すると言われています。
つまり、サーボモータとは「言いつけどおりに忠実に働く」という意味合いで名付けられたモータのことを指し、回転位置や回転速度などを制御できれば、その仕組みにかかわらず「サーボモータ」と呼ばれます。
そのため、ステッピングモータやコアレスモータもサーボモータに含まれる場合もありますが、ここでは、エンコーダ(回転検出器)を備え、その情報を基にドライバで速度や位置(角度)を制御するタイプのサーボモータについて説明します。
サーボモータとステッピングモータの違い
ステッピングモータもサーボモータと同様に、外部からの信号により回転角度を制御する機構を備えていて、機器類の位置決めなどが可能ですが、次のような違いがあります。
制御方式
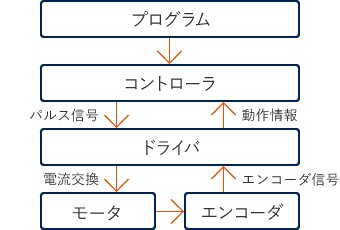
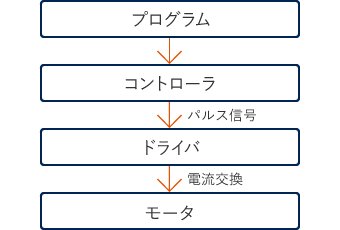
サーボモータはエンコーダ(回転検出器)によって回転位置を検知しており、エンコーダで検出した情報をコントローラへフィードバックすることで位置を制御します。このため精度の高い停止が可能であり、回転の停止中も位置がずれたときには元の位置に戻ります。一方ステッピングモータでは回転角度がパルス数に比例しており、ドライバがコントローラからこのパルス信号を受けることで位置を制御します。よって、位置を検知する機構を必要としませんが、位置ずれも認識できません。想定外の負荷変動などで脱調(指示された回転角度と、モータ回転の同期が失われた状態)が発生することもあります。
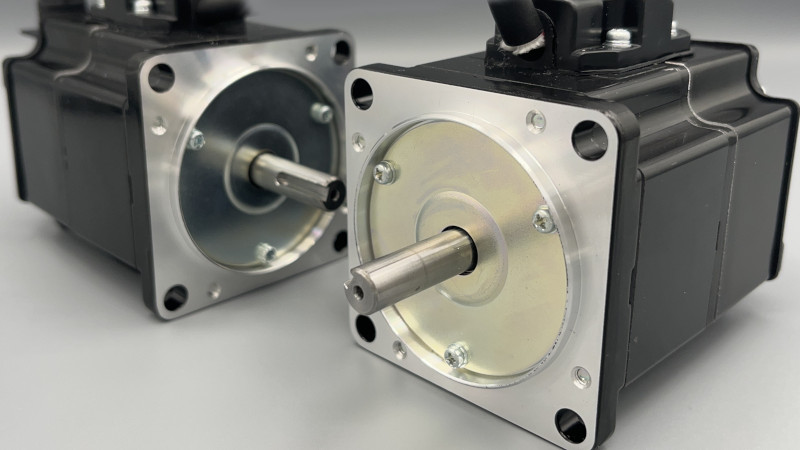
 サーボモータ
サーボモータ
 ステッピングモータ
ステッピングモータ
トルク/回転数
サーボモータは低速域から高速域まで安定したトルクを発生させ、高速運転も可能です。ステッピングモータは特に低速域で高いトルクを発生させますが、高速域ではトルクが減少するため高速回転には向いていません。
コスト
サーボモータは高価なロータリーエンコーダやサーボ制御装置(サーボドライバ)が必要になるため、ステッピングモータに比べると高価になります。
サーボモータの歴史
サーボモータの技術は産業用ロボットの進化とともに大きく発展しました。
米国では1950代から工場の自動化が注目され、ベルトコンベヤーや自動装置、産業用ロボットなどによる自動化が始まりました。初期の自動装置や産業用ロボットのアクチュエータの位置決めには油圧や空気圧が用いられていましたが、精度や安定運用、配管、油漏れ・空気漏れなどの課題がありました。
その後、1950〜60年代にDCサーボモータの技術が進展して実用化が進んだことにより、問題のある油圧や空気圧の機構に代わって産業用ロボットへ搭載されるようになりました。
さらに1980年代には、ACサーボモータが登場して、ロボットの小型・軽量化が進むなど、その実用性の高さから、今日ではほとんどの産業分野の機器類にACサーボモータが使われるようになっています。
サーボモータの種類
サーボモータは、DCサーボモータとACサーボモータに分類することができます。
DCサーボモータ
ブラシ付きDC(直流)モータで駆動するサーボモータです。DCモータはACモータに比べて制御が容易で、小型・低価格なことから以前は幅広く使われていましたが、ACモータの制御技術が進んだことで今日では使われる機会が減っています。
ACサーボモータ
AC(交流)モータで駆動するサーボモータです。DCモータに比べて制御が複雑ですが、制御技術が進化したことで、今日では最も普及しています。
ACサーボモータは駆動モータの種類によって同期(SM)型と誘導(IM)型に分類されます。この2つの違いは永久磁石の有無です。
同期(SM)型は永久磁石を使います。モータ出力が大きくなるにつれて高価な永久磁石の使用量が増えるので、高価になります。よって、出力が小さい領域(10kW未満)で多く使用されていましたが、今日では高性能な永久磁石が登場したことにより同期型が主流になっています。
誘導(IM)型は永久磁石を使わず、出力が大きい領域(10kW以上)で使用されます。
サーボモータの用途
サーボモータは正確な位置決め制御を得意としているため、産業用ロボットや精密機械の制御に幅広く使われています。
- 産業用ロボットの関節
- ヒューマノイド(人間)型ロボットの関節
- 食品機械の制御装置
- 包装機械の制御装置
- 搬送装置のベルト機構
- 電車などの自動ドア
- 液晶・半導体の検査装置などのX-Yテーブル
- プレス・ロールフィーダ
- 工作機械・検査装置の回転テープル
- プレス装置の制御
- ボンディング装置の制御
- 樹脂成形機の制御
- アミューズメント機器の制御
- ラジコンなどのホビー用途
- 塗布・蒸着装置
- 液晶・半導体のスピン式洗浄装置
ASPINAのサーボモータでお客様の課題を解決します
ASPINAでは、ブラシレスDCモータを用いた同期(SM)型のサーボモータを提供しています。また、ブラシレスDCモータやバイブリッド型ステッピングモータにロータリーエンコーダを搭載し、ドライバで必要なサーボ制御することで、ACサーボモータとしてご提供することも可能です。
ASPINAのサーボモータは、駆動・制御系から機構設計までを含んだシステム部品としてご提供しています。試作から量産、アフターサポートまで一貫して対応しています。
さまざまな業界、用途、お客様製品に求められる機能や性能、お客様の生産体制に合わせて、最適なご提案をいたします。
具体的なご要望や要求仕様のあるお客様だけでなく、次のようなお困りごとの段階でもお声掛けをいただき、開発から量産にまで対応しています。ぜひ、お気軽にご相談ください。
どんなモータが必要か、分からない
- 「新製品の開発が初期段階であり、具体的な仕様や設計図まで作りこんでいない。しかし開発を今後スピーディに進めるためモータについてのアドバイスが欲しい」
- 「モータに通じた専門家が社内におらず、理想の動きを実現するために必要なモータの知見がない」
モータとその周辺部分をまとめて設計するのが難しい
- 「当社のリソースは商品企画やコア技術の開発・設計に投入したい。それ以外のモータとその周辺部分の設計・開発をまとめて行ってくれる会社がないか」
- 「モータを変更すると他の機構部品の設計も変更せねばならず、工数と時間がかかりそう」
用途に合った既製品が見つからない
- 「自社製品に合ったモータのカスタム品が欲しいが、取り引きしているモータメーカーに断られた」
- 「モータをきめ細かく制御したいが、既製品モータでは対応できないので、あきらめるしかないのか」
ぜひ、お気軽にご相談ください。
同シリーズのコラム
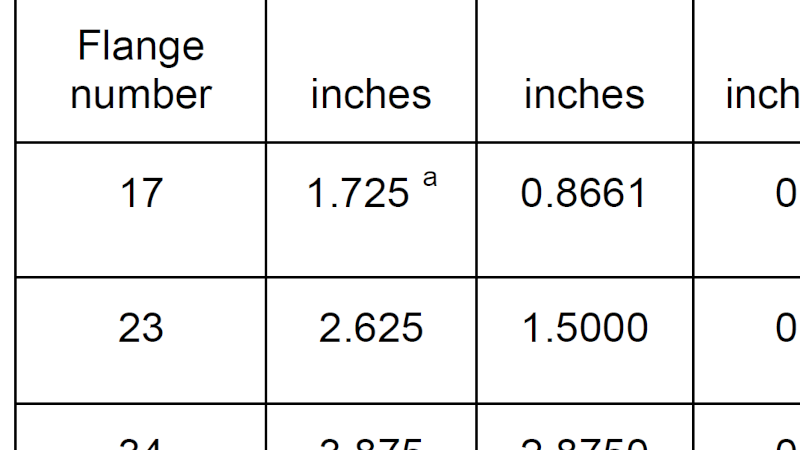
- NEMA17ステッピングモータ選定ガイド 取り付け寸法の規格から、用途・選び方・課題解決まで
- ステッピングモータのNEMAサイズ一覧と選び方ガイド
- ステッピングモータは何をするもの?
- DCモータの特長とその用途について解説
- ブラシ付きDCモータに比べブラシレスDCモータが優れている部分
- ブラシレスDCモータの価格と性能、部材について
- DCモータのタイプと特徴を解説
- ブラシレスDCギヤードモータとは
- ブラシレスDCモータの速度はどう制御する?速度制御方式を解説
- 小型ブラシレスDCモータの出力やサイズ・減速比の特徴と選び方のポイント
- ブラシ付きDCモータとブラシレスDCモータの違いを解説
- ブラシレスDCモータのデメリットとは?解決法をあわせて解説
- ブラシレスDCモータの利点とは?ブラシ付DCモータとの違いも解説
- 電動機とは
- ブラシレスDCモータとは
- ブラシレスDCモータの仕組みとは?駆動回路が必要な理由を解説
- どのように制御する?DCモータの速度制御
- ブラシレスDCモータには駆動回路必要?ブラシレスDCモータの制御方法
- ブラシ付きDCモータの仕組みとは?定期的なメンテナンスが必要な理由を解説
- どのように制御する?ステッピングモータの速度制御の方法
- ブラシレスDCモータの用途 その特徴を活かした例を紹介
- ステッピングモータの用途 その特徴を活かした例を紹介
- ステッピングモータの仕組みとは?制御が容易なモータ
- ブラシ付きDCモータとブラシレスDCモータにはどのような違いがある?それぞれを確認
- コンデンサモータとは
- ブロワとは
- アクチュエータとは
- ステッピングモータとは
- DCモータとは?その特徴や仕組みを紹介