ステッピングモータの仕組みとは?制御が容易なモータ
-
自動化
-
医療・福祉
-
環境
-
車載
-
宇宙
2021年1月27日
すぐ買える、届いてすぐ使えるモータを探す(「プレクスモーション」モータ製品サイト)
ステッピングモータは直流のパルス信号を印加して駆動するモータです。どのような動作をするモータなのでしょうか。ここでは、ステッピングモータの特徴や、動作する仕組みなどについてわかりやすく説明します。
ステッピングモータとは
ステッピングモータは、ACモータやDCモータのように、モータ軸を持続的に回転させるのではなく、一定の回転角度で断続的にモータ軸を回転させます。電源のON/OFFの繰り返しであるパルス信号によって、回転角度や回転速度を簡単に制御でき、正確性が非常に高いモータです。
イメージとしてわかりやすいものが時計の秒針です。1秒ごとに時を刻んでいる秒針を思い浮かべてみましょう。秒針は、1秒ごとに軸を6度だけ動かすように制御されています。一定のタイミング、一定の角度ずつ動くのが、ステッピングモータなのです。
ステッピングモータの特徴と用途
ステッピングモータは、内部にエンコーダーなどの位置検出用電子部品を使用していないため、シンプルで故障が少ないモータです。そのうえ、ステッピングモータは高精度なのが魅力です。
回転角度はデジタル入力によるパルス数に比例しているため、回転角度の制御が簡単です。その他にも、「低速での回転ができる」「停止時の自己保持力に優れている」「位置制御がオープンループで可能」といったメリットがあります。
デメリットとしては、「振動や騒音が出やすい」「想定外の負荷変動によって脱調する場合がある」ということです。
例えば、以下のような製品でも、ステッピングモータが採用されています。
- 製造装置
- 医療機器
- ATM
- ロボット
- 3Dプリンター
- 分析機器
- レーザープリンタ
- デジタルカメラ
- 自動販売機
- エアコンのルーバ
- 監視カメラ
ステッピングモータの種類
ステッピングモータは、回転子のモータ軸の構造によって、次の3つに分類されます。
- PM型
- 永久磁石型。回転子に永久磁石を使用しているモータで、「回転角度を細かく設定できない」という特徴があります。
- VR型
- バリアブルリラクタンス型。回転子に歯車状の鉄心が採用されており、回転角度を細かく設定できるモータです。
- HB型
- ハイブリッド型。永久磁石と歯車状の鉄心の両方を回転子に採用しています。PM型とVR型の両方の長所を併せ持っています。
また、コイルへの電流の流し方によって、次の2つに分類できます。
- ユニポーラ型
- ユニポーラは1つのコイルに対して、一定の方向へだけ電流を流すタイプです。制御回路が簡単で高速駆動に有効。ただし、バイポーラ型と比べるとトルクが得にくいというデメリットがあります。
- バイボーラ型
- バイボーラは1つのコイルに対して、双方向に電流を流すタイプです。モータの内部構造が簡単でモータの巻線が有効に使え、温度上昇が抑えられるという特徴があります。
ステッピングモータが動く仕組み
ステッピングモータは、巻線が巻かれたステータ(固定子)と軸方向に磁化された永久磁石を入れたローター(回転子)で構成されています。固定子の相巻線の励磁電流を切り替えることで、そのモータに固有の回転角度やステップ角で歩進します。
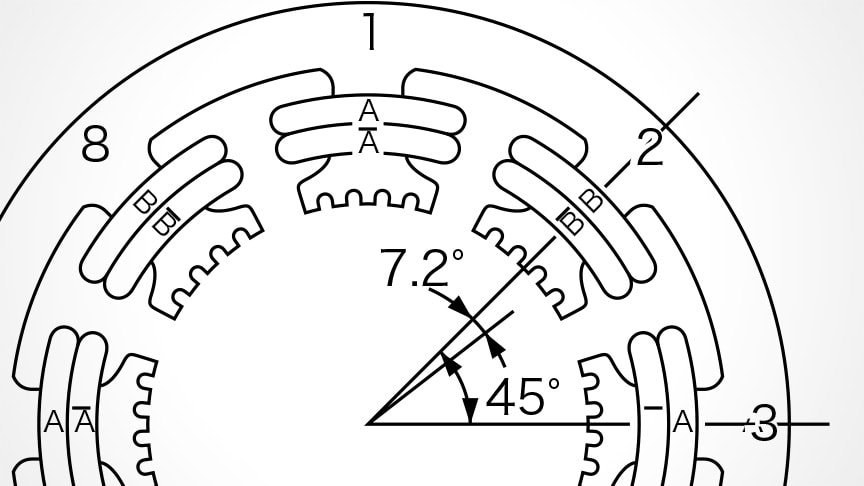
ここで、ステップ角1.8°、2相ユニポーラタイプのステッピングモータを例に、動作を説明します。固定子には8つの磁極が45°間隔で配置され、各磁極には5つの歯が7.2°間隔で配置されています。
そして各磁極には図1のようにコイルが巻かれています。コイルに表1のような電流を流すと、固定子には図2のように回転磁界が発生します。
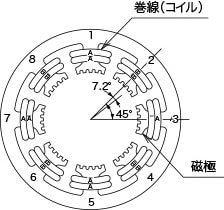 図1 固定子
図1 固定子
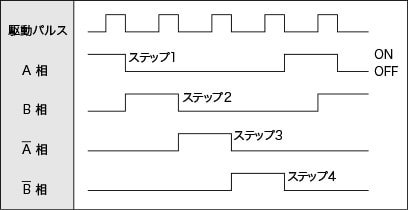 表1 励磁パターン(1相励磁)
表1 励磁パターン(1相励磁)
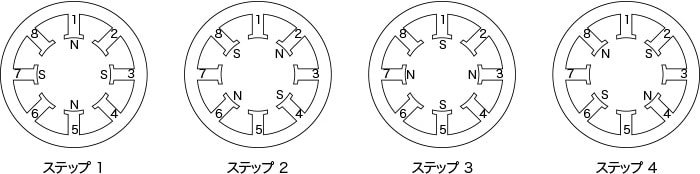 図2 励磁相切り替えによる回転磁界
図2 励磁相切り替えによる回転磁界
回転子は、50個の歯を持つ2個の回転子鉄心とマグネットから構成され、回転子鉄心は互いに半ピッチずらして組立てられています。回転子の励磁相を切り替えたときの回転子の動きを図3に示します。
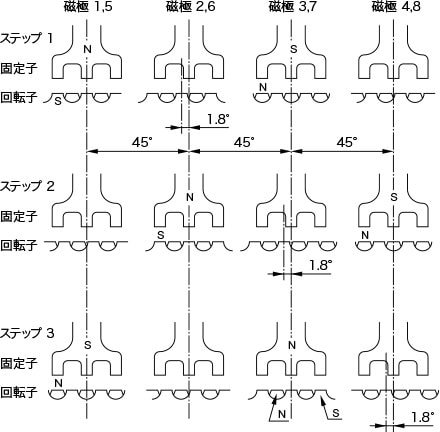 図3 1相励磁駆動
図3 1相励磁駆動
- ステップ1
- A相が励磁されることにより、回転子鉄心のS極側の歯は固定子の磁極1,5の歯と向い合い、N極側の歯は固定子の磁極の3,7の歯と向い合い、それぞれのSとNが引き付け合って安定します。この時、固定子の磁極2,6に対して回転子のS極側の歯と磁極4,8の歯に対して回転子のN極側の歯は1/4ピッチ(1.8°)位相が遅れています。
- ステップ2
- B相に励磁を切り換えます。この励磁状態での安定点は、固定子の磁極2,6と4,8の歯が回転子の歯と向い合う状態なので、B相の励磁により回転子は1/4ピッチ(1. 8°)回 転して安定します。
- ステップ3
- 以後、励磁相を切り換えるたびに、回転子は1/4ピッチずつ回転します。
ステッピングモータの制御方法
ステッピングモータの回転は、電力信号を与えることで、正確に回転を制御することが可能です。電源のオンとオフが繰り返されるパルス信号という電気信号によって制御されており、ステッピングモータの回転角度は、ドライバに入力するパルス信号の数に比例しています。なお、モータの回転速度は、パルス信号の速度に比例して変化します。
回転角度、回転速度、回転方向は、以下3種類のパルス入力方式のいずれかにより制御できます。
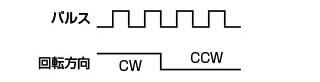
1パルス入力方式
回転司令パルス信号に回転するためのパルスが入力され、回転方向信号にHigh/Lowのレベルを入力することで回転方向が制御可能。
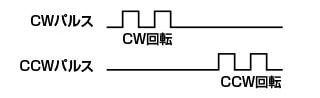
2パルス入力方式
CW信号にパルスが入力される、もしくはCCW信号にパルスが入力されるかによって回転方向を制御します。CWパルスでは正転し、CCWパルスでは逆転。
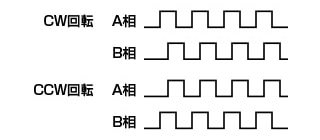
A相/B相パルス入力方式
A相信号とB相信号に90度くらい相のずれたパルスを入力して、位相が進んでいるかを判断して回転方向を制御する方式。A層が進んでいれば正転、B層が進んでいれば逆転します。
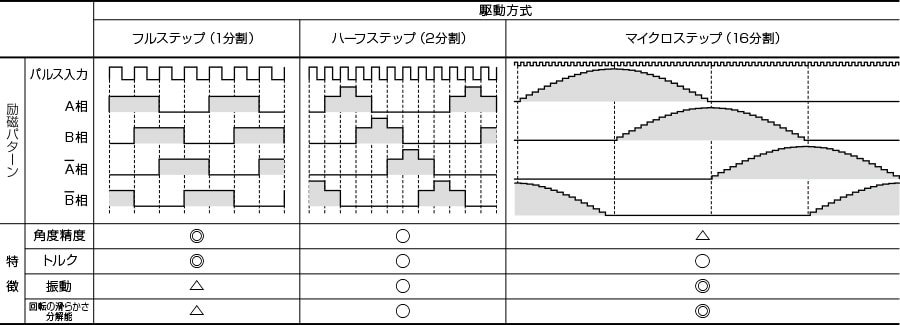
また、励磁パターンによって、フルステップ、ハーフステップ、マイクロステップといった駆動方式を制御でき、モータの用途に合う特性を出すことができます。特に、マイクロステップは、励磁電流をほぼ無段階でなめらかなサイン波で流すことによって、より細かなステップ角制御が可能です
一般的なステッピングモータの場合、ステップごとに減衰振動を伴って停止します。これによって、振動や騒音が発生してしまう原因となることがあるのです。ステップ角を細かくすることで減衰振動を低減させ、マイクロステップ駆動により低速域における振動や騒音を減らすことができるでしょう。マイクロステップ方式は、その他の駆動方式と比較すると、角度精度がやや劣るものの、低振動、振動性能を求める際には、とても役立つ駆動方式なのです。
シンプルな仕組みで稼働するステッピングモータ
ステッピングモータは、一定の回転角度で回転するモータです。磁石とコイルによるシンプルな構造で、故障が少ないうえに高精度なことが魅力といえるでしょう。パルス信号で簡単に制御でき、パルス信号の数や速度、パルス信号の入力方式によって、ステッピングモータの回転角度と回転速度が決定されます。制御方法をしっかりと理解して、効果的にステッピングモータを活用しましょう。
ステッピングモータでお客様の課題を解決
ASPINAのステッピングモータは、モータ単体だけでなく、駆動・制御系から機構設計までを含んだシステム部品としてご提供しています。試作から量産、アフターサポートまで一貫して対応しています。
さまざまな業界、用途、お客様製品に求められる機能や性能、お客様の生産体制に合わせて、最適なご提案をいたします。具体的なご要望や要求仕様のあるお客様だけでなく、次のようなお困りごとの段階でもお声掛けをいただき、開発から量産にまで対応しています。ぜひ、お気軽にご相談ください。
どんなモータが必要か、分からない
- 「新製品の開発が初期段階であり、具体的な仕様や設計図まで作りこんでいない。しかし開発を今後スピーディに進めるためモータについてのアドバイスが欲しい」
- 「モータに通じた専門家が社内におらず、理想の動きを実現するために必要なモータの知見がない」
モータとその周辺部分をまとめて設計するのが難しい
- 「当社のリソースは商品企画やコア技術の開発・設計に投入したい。それ以外のモータとその周辺部分の設計・開発をまとめて行ってくれる会社がないか」
- 「モータを変更すると他の機構部品の設計も変更せねばならず、工数と時間がかかりそう」
用途に合った既製品が見つからない
- 「自社製品に合ったモータのカスタム品が欲しいが、取り引きしているモータメーカーに断られた」
- 「モータをきめ細かく制御したいが、既製品モータでは対応できないので、あきらめるしかないのか」
ぜひ、お気軽にご相談ください。
すぐ買える、届いてすぐ使えるモータを探す(「プレクスモーション」モータ製品サイト)
同シリーズのコラム
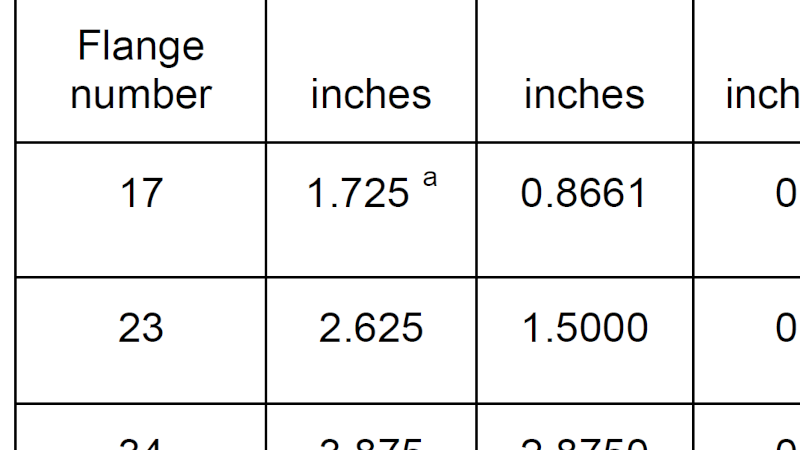
- NEMA17ステッピングモータ選定ガイド 取り付け寸法の規格から、用途・選び方・課題解決まで
- ステッピングモータのNEMAサイズ一覧と選び方ガイド
- ステッピングモータは何をするもの?
- DCモータの特長とその用途について解説
- ブラシ付きDCモータに比べブラシレスDCモータが優れている部分
- ブラシレスDCモータの価格と性能、部材について
- DCモータのタイプと特徴を解説
- ブラシレスDCギヤードモータとは
- ブラシレスDCモータの速度はどう制御する?速度制御方式を解説
- 小型ブラシレスDCモータの出力やサイズ・減速比の特徴と選び方のポイント
- ブラシ付きDCモータとブラシレスDCモータの違いを解説
- ブラシレスDCモータのデメリットとは?解決法をあわせて解説
- ブラシレスDCモータの利点とは?ブラシ付DCモータとの違いも解説
- 電動機とは
- ブラシレスDCモータとは
- ブラシレスDCモータの仕組みとは?駆動回路が必要な理由を解説
- どのように制御する?DCモータの速度制御
- ブラシレスDCモータには駆動回路必要?ブラシレスDCモータの制御方法
- ブラシ付きDCモータの仕組みとは?定期的なメンテナンスが必要な理由を解説
- どのように制御する?ステッピングモータの速度制御の方法
- ブラシレスDCモータの用途 その特徴を活かした例を紹介
- ステッピングモータの用途 その特徴を活かした例を紹介
- ブラシ付きDCモータとブラシレスDCモータにはどのような違いがある?それぞれを確認
- コンデンサモータとは
- サーボモータとは
- ブロワとは
- アクチュエータとは
- ステッピングモータとは
- DCモータとは?その特徴や仕組みを紹介