人工衛星の姿勢制御設計とリアクションホイール
-
宇宙
-
小型人工衛星・CubeSat
2023年4月19日
人工衛星の姿勢制御の重要性と姿勢制御装置の種類
人工衛星の姿勢制御は衛星の運用において重要な役割を果たします。例えば通信衛星の場合、アンテナの向きを正確に制御することで、通信品質を向上させることができます。また地球観測衛星の場合、カメラの向きを正確に制御することで、地球の観測データを高精度に取得することができます。このように人工衛星は、地球の周りを周回しながらその役割を果たすために、正確な姿勢制御が必要です。しかし、地球を周回する中で、太陽からの放射光や大気圏との摩擦などさまざまな力によって重心に対して偏りが生じ、それが機体を回転させる力となります。
このように人工衛星の姿勢制御は、衛星の設計と運用において重要な要素で、また多くの技術的課題が存在します。例を挙げると、アンテナやカメラを向けたい方向や時間をどれだけ正確に実施できるか、それを限られた搭載空間・重量・エネルギーでどのように組み合わせるか、故障のリスクに対し、バックアップできるか、などが考えられます。
これらの課題を克服するために、リアクションホイール、磁気トルカ、スラスター、CMG、太陽センサー、ジャイロスコープ、磁気センサー、スタートラッカーなどの航法誘導制御システム(GNC)機器を組み合わせることで、効果的に姿勢制御を行うことができます。
リアクションホイールによる人工衛星の姿勢制御の設計で考慮すべきこと
人工衛星の機体を回転させる微小なモーメントはリアクションホイールが吸収でき、それによって人工衛星の姿勢制御が行えます。リアクションホイールの回転数の変化によってそのモーメントは吸収されますが、長期にわたって同じ方向にモーメントが蓄積されると、やがてリアクションホイールの回転数が限界に近づき、そのままでは制御が破綻する「飽和」状態となります。
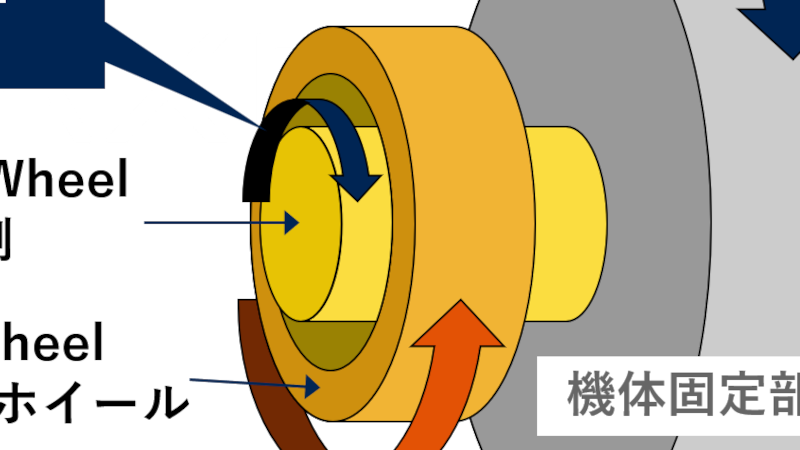
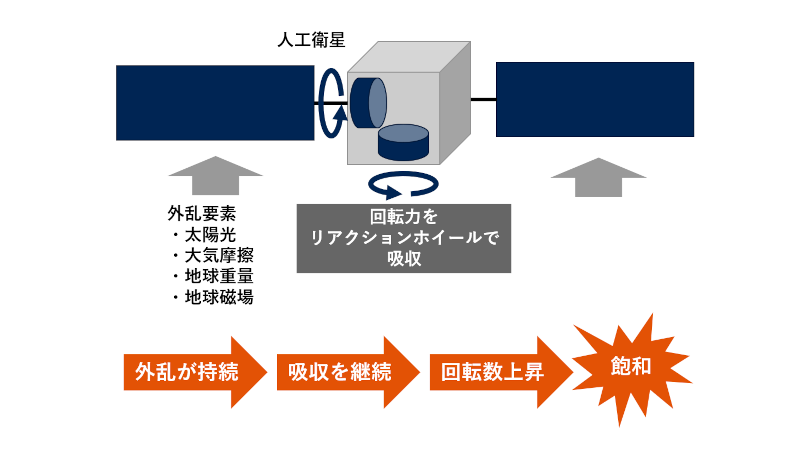 人工衛星が受ける外乱 リアクションホイールによるモーメントの吸収とその飽和
人工衛星が受ける外乱 リアクションホイールによるモーメントの吸収とその飽和
リアクションホイールに蓄積されるモーメントを解消するために、「アンローディング」と呼ばれるリアクションホイールの回転数を調整する動作を行う必要があります。具体的には、リアクションホイールの回転数を減少させることで発生する運動量を磁気トルカやスラスターで吸収し姿勢が大きく乱れないように調整しながら、リアクションホイールの回転数を目標とする回転数まで落としていきます。
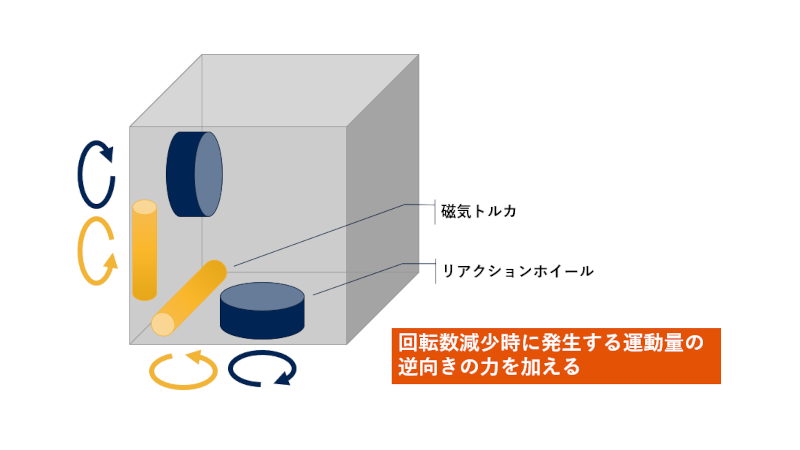 リアクションホイールをアンローディングする仕組み
リアクションホイールをアンローディングする仕組み
アンローディングを行う搭載機器として、キューブサット(CubeSat)は磁気トルカのみ、MicroSatやMiniSatサイズの人工衛星は磁気トルカとスラスター両方を搭載する場合が多いです。スラスターは、大きく運動量を変化させることができますが、細かい制御はできません。一方、磁気トルカは細かい制御が可能ですが、運動量を変化させる速度はスラスターよりも遅いです。
またアンローディング中は、人工衛星の姿勢制御の精度が低下するため、観測や通信などの機能を実施することができません。そのため、どのくらいの頻度でアンローディングを行う必要があるか、衛星に受ける外乱の量・リアクションホイールが蓄積できる運動量などから計算し、ミッションのスケジュールに組み込んでおく必要があります。
このように、リアクションホイールを使った人工衛星の姿勢制御ではアンローディングの管理が重要です。
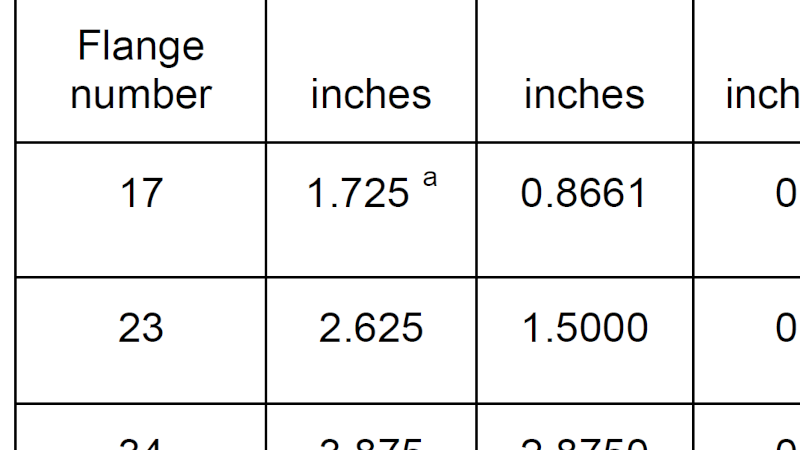
またリアクションホイールを用いた姿勢制御を行う場合には、人工衛星が軌道上で運用時に受ける外乱の大きさをシミュレーションで試算し、「アンローディング」の発生頻度や運用スケジュールなどに基づき、適切な角運動量を持つリアクションホイールを選定する必要があります。
人工衛星の姿勢制御技術の今後
今後、より高精度な姿勢制御技術の開発が進められ、人工衛星の様々な役割に対応するための新たな姿勢制御技術が開発されることが期待されています。例えば、人工知能を利用した姿勢制御技術や、より高精度なセンサーを使用した姿勢制御技術などが研究されています。これらの技術の進歩により、より高精度で効率的な姿勢制御が可能になることが期待されます。
ASPINAでは小型人工衛星/キューブサット用のリアクションホイールを開発中
ASPINAは、小型人工衛星やキューブサットで求められるニーズに応えるリアクションホイールを現在開発しています。
製品の詳しい情報やお見積りなどは、入力フォームからお気軽にお問い合わせください。