卵を立たせ、走らせる。ASPINAのテクノロジー・ソリューション
-
自動化
-
医療・福祉
-
環境
-
車載
-
ロボティクス
-
パワーアシストスーツ
-
アシストモビリティ(乗り物)
-
搬送ロボット
-
リハビリ機器
-
義肢
-
搬送装置
新しい「動き」を、画像認識や位置検出など先端技術の組み合わせで
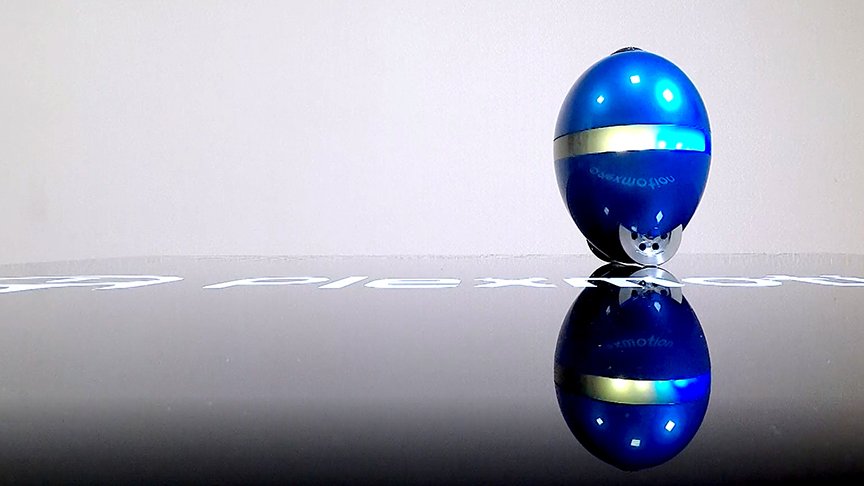
探検家クリストファー・コロンブスは、卵を立たせて自らの偉業を示しました。「卵を立たせるという困難に思えることを、挑戦する姿勢、新しいアイデア、十分に備わった力量で実現する」。そして5世紀の時を経て、私たちは、立った卵をさらに走らせることでその逸話を超えようと考えました。
そして、展示会や商談におけるデモンストレーション用の仮想製品として、モータ制御技術に画像認識や位置検出などの最先端技術を組み合わせて卵型の筐体に詰め込んだ、倒立二輪ロボット「Plegg」を開発しました。
私たちの力が求められる新しい分野が次々に生まれています。例えば、製造業界等における人手不足の解消のため、協働ロボットをはじめAGV(無人搬送車)やAMR(自律型モバイルロボット)で使われる、工場内を自由に動かすためのモジュールやシステムの開発も行っています。「Plegg」は、そのような製品を開発するASPINAの力を分かりやすい形で示すものとして、私たちがお会いする方々からご好評いただいています。
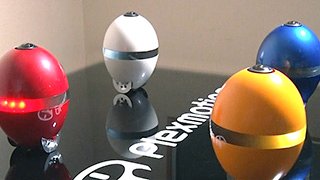 倒立二輪ロボット「Plegg」
倒立二輪ロボット「Plegg」
走行領域内を4台が衝突せず協調して動作
数多の技術をベースに、新しい手法を取り入れる
「Plegg」は自分の傾きをセンサーで検出し、車輪を動かす2つのモータを適切に制御することでバランスを保ちます。ASPINAでは、このバランス制御を非常に短い周期で繰り返すことで、なめらかな走行と安定した静止を実現する「倒立振子」の技術を活用して「Plegg」を開発しました。
「倒立振子」とは、重心が高い位置にあるものを、立たせたまま動かす制御システムです。通常の「倒立振子」による制御では、卵のような形のものを二輪で立たせると、前後に揺れながら静止するようになるのですが、ASPINAが持つモーションコントロール技術による「倒立振子」では、ピタリと止まって静止しているかのように制御できます。
「倒立振子」の実現には、モータの回転制御だけでなく、1つのマイコンで2つのBLDCモータを電流ベクトル制御し、完全同期で2軸の位置制御を行ったり、モーションセンサー(3軸加速度、3軸角速度)による姿勢のセンシングなどが必要になります。そこには、ASPINAがこれまでに蓄積していたモーションコントロール技術や、傾きに応じて正確にモータ制御するトルク制御技術などが活かされました。
一方で、「Plegg」を決められたエリアの中で二輪走行させるために、「Plegg」が自らの位置情報をホストマシンに無線通信で送信し、ホストマシンが全ての状態を管理して指令を送るシステムを、今回新たに構築しました。当初ASPINAでは「Plegg」の上部に魚眼カメラを取り付け、周囲に設置されたマーカーを読み取らせて位置検出を行うことにしました。ところが、魚眼カメラのカラー画像をそのまま使えば蛍光灯など他の光が入ってしまい、外乱によってマーカーの判別が難しくなることがわかりました。そこで、魚眼カメラに特殊な改造を行い、設置するマーカーも工夫する事で外乱を防止しました。
とはいえ、この方法をとっても、完全に外乱を防止する事はできません。そこで、ASPINAでは画像をフィルタリングし、外乱の含まれる画像の中から正しいマーカーを選別する新たなアルゴリズムを開発して、位置検出を安定化させました。
また、魚眼カメラから得られる画像には遅延があるため、画像から検出された位置と、走行中のPleggの実際の位置には誤差が生じました。その課題も「Plegg」本体のオドメトリ情報とASPINA独自の補正方法を組み合わせて解決しています。
 画像認識、センシングと多軸制御、ギアなどで二輪走行を実現
画像認識、センシングと多軸制御、ギアなどで二輪走行を実現
ASPINAのエンジニア集団がもたらした、長年の技術の蓄積とユニークな発想
ASPINAは半世紀以上にわたり、モータの開発・製造だけでなく、モータを組み込んだ製品として光学ドライブや印刷機器、最近では業務用ハイスピードカメラや福祉機器などを開発・製造する事業も展開してきました。
このような事業展開を推進するために、ASPINAにはモータ技術だけでなく、画像・映像処理技術やロボット制御技術、無線通信技術など様々な要素技術を保有しています。さらに、外観デザインから機構設計、電源管理、さらにはデータ処理に関わる回路のハードウェア設計や、ファームウェアなどのソフトウェア設計に関わる技術や人材が蓄積されています。
それぞれの技術に関わる部署間では、積極的に人材交流や情報共有が進められており、エンジニアの中には、入社後に電子機器事業部やシステム機器事業部、研究開発部門など複数の部署で知見を積み重ねている者も多くいます。このように、ASPINAが誇るさまざまな要素技術の蓄積と、それを横断的に扱える人材が、「Plegg」のような複雑な構成と制御、そしてユニークな見た目を持つ製品の開発に繋がったのです。
例えば「Plegg」の走行ルートは、本来はロボットのルート設計とは関連性が薄い、CADのデータ処理技術を使って構築することで、比較的短期間に導き出しました。また、魚眼カメラへの外乱を少なくするアイデアや、かわいいと好評だった卵形のデザインも、企画に関わった社員からの提案でした。
 Pleggの内部構造 コントローラー、9軸モーションセンサー、減速機、無線通信用チップ、バッテリー、赤外線カメラなどを搭載
Pleggの内部構造 コントローラー、9軸モーションセンサー、減速機、無線通信用チップ、バッテリー、赤外線カメラなどを搭載
世の中になかった新たな分野や用途に、ASPINAの「動き」のソリューションを
ASPINAでは展示会などでお客様が「Plegg」を見ていただくことで、もともとお客様が持っているアイデアに火をつけ、お客様の製品開発が進んでいくと考えています。
実際に、ある企業の方が展示会での「Plegg」が動く様子を見て、自社が作っているロボットの筐体を移動させる台車に応用できないかと相談されました。「Plegg」はデモストレーション用に作られた小さなロボットなので、そのままでは使えません。そこで、ASPINAでは「Plegg」の専用基板を作って2軸のモータを回すことで、お客様のニーズに応える台車ユニットのサンプルを完成させました。
また、ASPINAでは「Plegg」の開発で得られたさまざまな技術が、多様な分野で活躍するロボットに応用できるのではと考えています。例えば、「倒立振子」による二輪走行ならば小回りができるので、警備用などの見回りロボットに応用可能です。また、画像認識で得られた技術は、ロボットの目となるビジョンシステムに活かせるでしょう。さらに、位置検出技術や無線による通信技術は、動作制御や故障検出などのAIシステムと連携した製品にもなりそうです。
これまで世の中になかったような新しい分野や用途、さらにはこれから必要とされると考えられる分野や用途において、ASPINAは「動き」のソリューションを提供していきます。
 ホストの専用アプリが複数台の「Plegg」と通信しながら走行を遠隔制御
ホストの専用アプリが複数台の「Plegg」と通信しながら走行を遠隔制御
Exhibition information
-
2026年7月9日
-
2026年6月22日
-
2026年6月18日